→ Section 1: What is digital audio, really?
→ The Wide World of DSP
It seems pretty reasonable that to understand how to process digital audio, you must first understand what digital audio is. As you'll soon find out, digital audio is merely a category of a larger kind of digital data called signals. Signals are that new beat you spent all night working on, the readings from an EKG sensor, seismic data from geophones, and even images of cats on the internet! The point is that while this course is specifically geared towards digital audio, that is far from the only application of this course's material. If you want more information on DSP's applications in image processing and data compression, I'd recommend looking through Chapters 23 to 27 of Dr. Steven W. Smith's “The Scientist and Engineer's Guide to Digital Signal Processing”
→ Analog vs Digital
What even is analog? Why does that older fellow in the music store keep insisting that his dusty old analog synthesizers sound so much warmer and natural than the modern digital trash? Does he even know what the word “analog” means? Since the D in DSP stands for “digital,” it only makes sense to start by explaining the difference. Before computers became the standard for audio processing, the main option for synthesizing and processing audio came in the form of dedicated electronic circuits. The sound waves in these circuits were represented through fluctuations of voltage over time. In other words, the fluctuations in voltage were an analog of the actual signal it represents (and that's why it's called "analog." The older meaning of the word "analog" is a noun and synonymous with words like "comparable" or "representation")! Since analog signals are represented by changes in energy, and physical levels of energy can't jump from one value to another in 0 units of time, the resulting signal is continuous. In other words, if you attached a polygraph machine to the source of an analog signal, and traced your finger across the resulting curve, you would never have to pick up your finger; the polygraph's position won't teleport from one position to another. To answer the question about the older fellow in the music store, there is some truth to his claim that analog synths can sound more natural. Electronic components like resistors and capacitors are prone to minor fluctuations in their current, voltage, and resistance. The result of this interference is noise which gives analog signals their characteristic warmth.
In comparison, digital signals are discrete. Rather than a continuous curve, the polygraph would show a set of evenly spaced points for a digital sound source. This method works well for computers as you can store a digital signal pretty efficiently on a hard drive, while you would need an infinite amount of storage space to store an analog one. Since computers store signals using lists of numbers that represent sound rather than the continuous voltage signals in analog circuits, digital signals don't suffer from the same noise interference that analog signals do. Since our application is audio programming, we will only focus on digital signals from now on.
→ Signals, Samples, Amplitude, and Sample Rate
So, what is this signal? A signal is a list of numbers over a fixed rate of time. In the case of audio, the numbers are known as the “samples” and they measure the “amplitude” at each sample's point in time. Typically, amplitude is denoted as a decimal value between -1 and 1. The way I like to think about amplitude is by imagining the cone of a speaker. An amplitude of 1 means the cone is pushed all the way out, and -1 is pulled all the way in. From the rapid movement of the cone's position over time, you get sound. The fixed rate of time is known as the “sample rate”, which is commonly measured in samples per second. The most common sample rate in music is 44.1khz, or 44,100 samples per second.
→ Try it Yourself: Your First Waveform
We've been doing an awful lot of talking, so it's only fair now to let you do some programming. In addition to the lessons, we have included a playground where you can test out your audio programming skills, make cool sounds, and share your creations. This playground uses a slightly modified version of javascript, where the editor exists inside a function “processAudio” that expects a sample to be returned at the end of your code. Also, we have included aliases for multiple useful functions such as shortening Math.sin() to just sin().
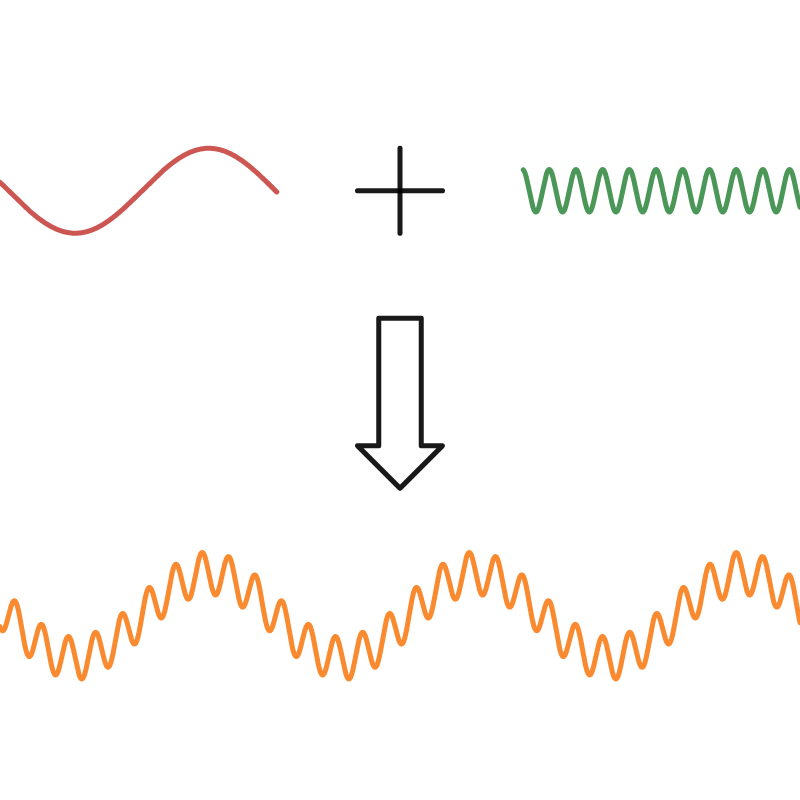
Without further ado, here's your first exercise. You might have noticed that for the examples, we have been using a sine wave. The filled-in code produces a sine wave, but a very slow one. You first want to speed that wave up so that it's audible (You can peek ahead to the frequency section if you get stuck). Next, try adjusting the amplitude of the wave (without adjusting the volume slider). Finally, try experimenting with adding sine waves of different speeds and amplitudes together. You can start the exercise here.
→ Bit Depth and the "Retro" Sound
Computers, and especially older ones, have a hard time accurately storing non-whole numbers. Since a digital audio signal's values are non-whole numbers by nature, that creates a limitation on how precise each value can be. In DSP, this precision is known as the “Bit Depth” of a digital signal. The bit depth is merely the amount of bits required to hold said number (Here is a good resource to understanding bits and binary numbers). Most modern digital audio workstations use a standard bit depth of 32 bits, meaning that there are 232 possible values a sample can have between -1 and 1. Converting to lower bit depths forces samples' amplitudes to be quantized (snapped to the closest intermediate value). The effect of this is a noisier audio signal that sounds characteristically "retro" (since old hardware had lower bit depths).
→ Try It Yourself: Your First Effects
Let's put that knowledge of bit depth to good use now. For your first audio effect, you will be building a downsampler. A downsampler, also known as a decimator, takes an audio signal of one sample rate and plays it as if it was another lower sample rate. For example, if you want to halve the sample rate, you can output a variable that only updates for every other sample. To cut the sample rate by a third, you would only update the variable for every third sample, and so on. This has the effect of creating buzzing high-pitched artifacts in the sound (you can hear this effect in songs like Edge by Rezz). In the starter code, we have defined a persistent output variable (global.output), a sine wave input (input), and a parameter for the intensity of the downsampling (b). The output variable is persistent (by being in the global object), because all other variable declarations/definitions are executed for every sample and can't persist across multiple samples. Your job is to edit the program such that the output updates every b-th sample. (hint: what does a percent sign do in javascript?)
Downsampler Starter Code
Downsampler Solution Code
If you're up for a bit of a harder challenge, you can try building a bitcrusher. A bitcrusher is a common effect that takes a signal with a high bit depth and “crushes” it down to a lower bit depth by rounding the samples to the nearest evenly spaced value. For example, if the bit depth was set to 2, the values that the wave will snap to are -1, -0.5, 0.5, and 1. For a bit depth of 3, it would be -1, -0.75, -0.5, -0.25, …, 0.75, 1. In the starter code, you are given two variables: a sine wave signal (wave) and a bit depth (b). Your goal is to quantize the signal into 2b evenly spaced values between 0 and 1. (Hint: using the round() function could be useful if you could change the range of the wave to make it work).
Bitcrusher Starter Code
Bitcrusher Solution Code